
The UngenauBot

By UngenauRobotics
Fabian Bircher and Ilmar Hurkxkens
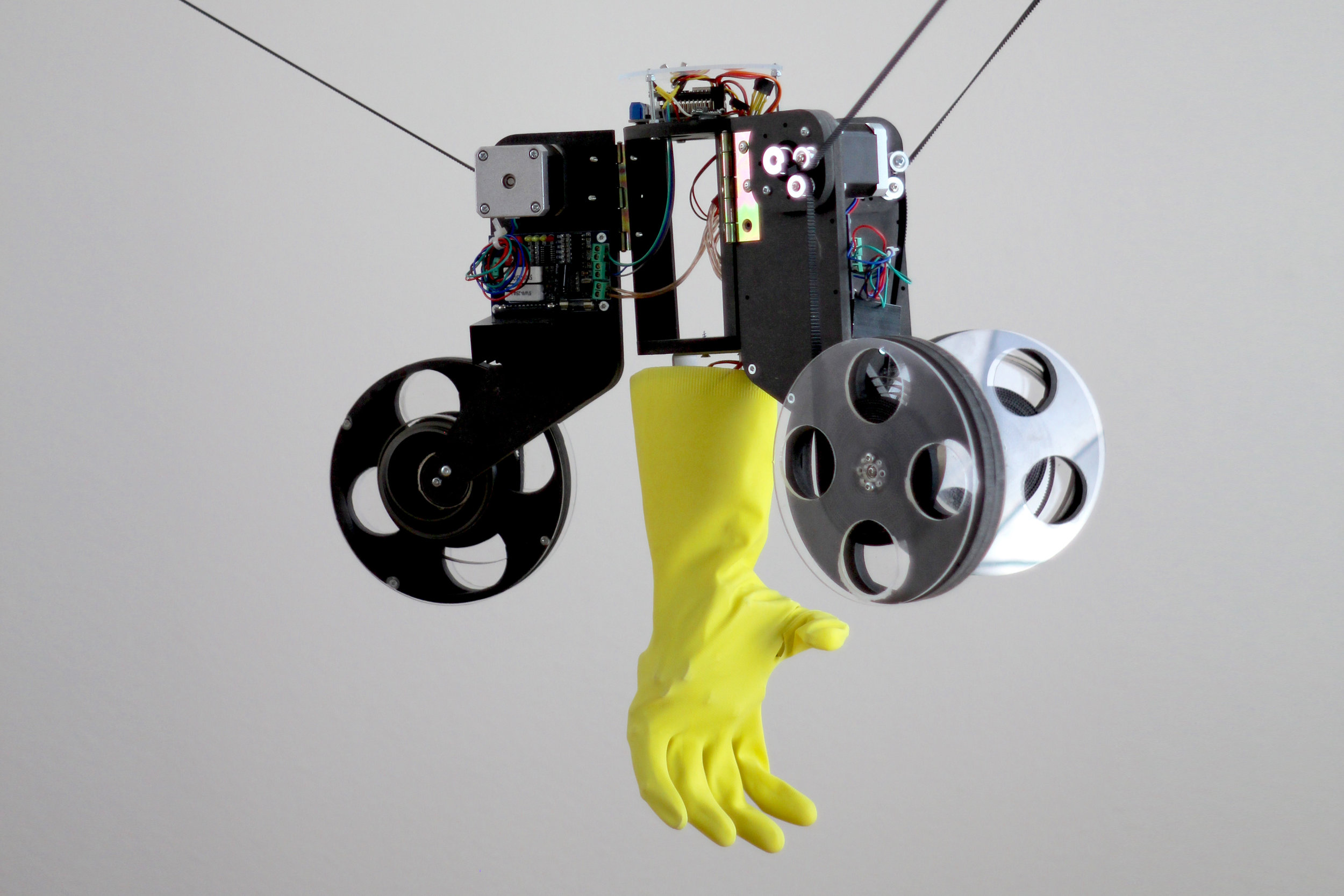
The Ungenaubot, 2018. Photograph by Ilmar Hurkxkens and Fabian Bircher
Robotic systems work in the background of society, at times delivering questionable services, yet there is a pervasive obliviousness to their ubiquitous presence because of their diverse but rarely humanoid appearance. The UngenauBot performs banal activities in unusual settings using a humanoid hand—embodied by an everyday yellow rubber glove—to provoke an affective response to robotics. This prototype robot is suspended at three points so that it can move freely in a given space. Sensors mounted within the glove allow it to interact with its environment. The embodiment of the robot did not arise from a meticulous design process but is the logical result of its intended movement in space. The “brain” was added only after the “body" of the UngenauBot was finished and reveals itself by interacting with its surroundings. The whimsy of the rubber glove provides a point of connection for the audience to imagine the robot as a person instead of a machine.
The UngenauBot deliberately exploits the insufficiency of its sensors and computing power to generate unpredictable situations. It is a clumsy, spontaneous artifact with which the audience can empathize. While robots are popularly portrayed as superhuman, capable of fulfilling clearly defined tasks with high precision, the UngenauBot reveals that robotic systems are purely mechanical and equally dumb, crashing when it hurtles at full speed into a situation that a human could perceive and navigate instantly.

Interaction with the yellow rubber glove, 2019. Photograph by Ilmar Hurkxkens and Fabian Bircher
UngenauRobotics follows three house rules:
A robot must never stop.
A robot must follow its own will.
A robot does not have to be successful.
The rules are a contemporary alternative to the three laws of robotics set forth by the biochemist and science fiction writer Isaac Asimov in the 1940s that aimed to protect people from humanoid superiority. Instead of focusing on the possibilities of advanced artificial intelligence as Asimov did, the rules of UngenauRobotics are meant for the robots that have more in common with a trash compactor than HAL or Blade Runner, those for whom self-destruction is a much bigger danger than any risk posed to humanity.

The Ungenaubot handling simple tasks in a take away restaurant, 2018. Photograph by Ilmar Hurkxkens and Fabian Bircher
The long-term goal of UngenauRobotics is to develop physical systems that will not only function in the laboratory or in short demonstrations but will perform during continuous public installations. The combination of Dadaistic programming with the possibilities of human empathy and interaction aroused by the humanoid hand questions the relations between human, robot, and robotic science itself: Who serves whom?

The construction of the Ungenaubot, 2018. Photograph by Ilmar Hurkxkens and Fabian Bircher

The Ungenaubot handling simple tasks in a take away restaurant, 2018. Photograph by Ilmar Hurkxkens and Fabian Bircher

The Ungenaubot, 2018. Photograph by Ilmar Hurkxkens and Fabian Bircher
Endnotes
(1) Isaac Asimov set forth the following three laws of robotics in his short story, Runaround:
One—“A robot may not injure a human being or, through inaction, allow a human being to come to harm.”
Two—“A robot must obey the orders given it by human beings except where such orders would conflict with the First Law.”
Three—“A robot must protect its own existence as long as such protection does not conflict with the First or Second Laws.”
Runaround was first written in 1941 and later appeared in several published collections, including I, Robot. Isaac Asimov, “Runaround,” in I, Robot (1950; repr., London: Harper Voyager, 2013), 31–53.
Bio
Ilmar Hurkxkens studied architecture at the Technical University of Delft. Since 2010 he has taught at the Chair of Landscape Architecture of Professor Christophe Girot at the ETH Zurich. Part of his work will be published through landskip.ch, a laboratory focusing on the development of new instruments for landscape architecture. He is currently working in Zurich, where he is doing his doctorate at the Chair of Landscape Architecture at the ETH.
Fabian Bircher studied architecture at the ETH Zurich. Since 2011 he has worked with an IT startup and various architectural firms. In parallel, he founded the company vonturm with Eva Wüst, which is active in the field of architecture and develops electronic luminaires. Fabian Bircher has co-initiated art spaces in Zurich and has developed numerous projects integrating architecture, art, and science.




